全自动化交通管制处理,只需一键
作为产品级工业控制软件,INF拥有全自动化的交通管制处理能力,基于大数据处理和机器学习(深度学习多神经网络算法),无需人工参与移动机器人集群间的管制关系,例如处理AGV之间的交通管控、死锁预防等。
很久以前,INF系统使用基于时间窗预测的方式处理集群之间可能出现的死锁,并实时调整决策层调度机器人移动速度和启停。使用时间窗预测的其他行业的典型案例有铁路网调度、空中管制等,是非常流行的用于交通管制处理的方法之一。
AGVsTD最初使用ML是为了在早期基于时间窗预测式预防集群间发生死锁的场景下来降低交通阻塞率的(注意:现在的INF系统中,降低交通阻塞率的工作职责被划分到INF Runtime System(简称INF.RTS)中的运输优化系统(TOS))。
虽然ML在降低交通阻塞率中表现优秀,但AGVsTD一直认为基于时间窗预测的交通管制算法在复杂工业物流环境中面对较强外界干扰的场景下几乎是很难做到可持续发展的(例如火车调度网路受到外界恶劣天气导致的大面积长时间延误),而INF系统的应用环境正是经常受到外界干扰的复杂工业制造物流场景。另外当时正赶上INF 运输优化系统(毫秒级处理设备池和订单池之间的映射关系)的开发对基于时间窗的预测频率提出了超高要求,此时的基于时间窗预测的交通管制算法所表现的弊端让AGVsTD觉得越来越难以将INF做到可持续发展,而INF的无穷概念又将可持续发展作为首要目标。
现在,一种脱离预测的应对较强外界干预的基于深度学习多神经网络的空间法则预防冲突的交通管制算法---INF.ML应运而生。
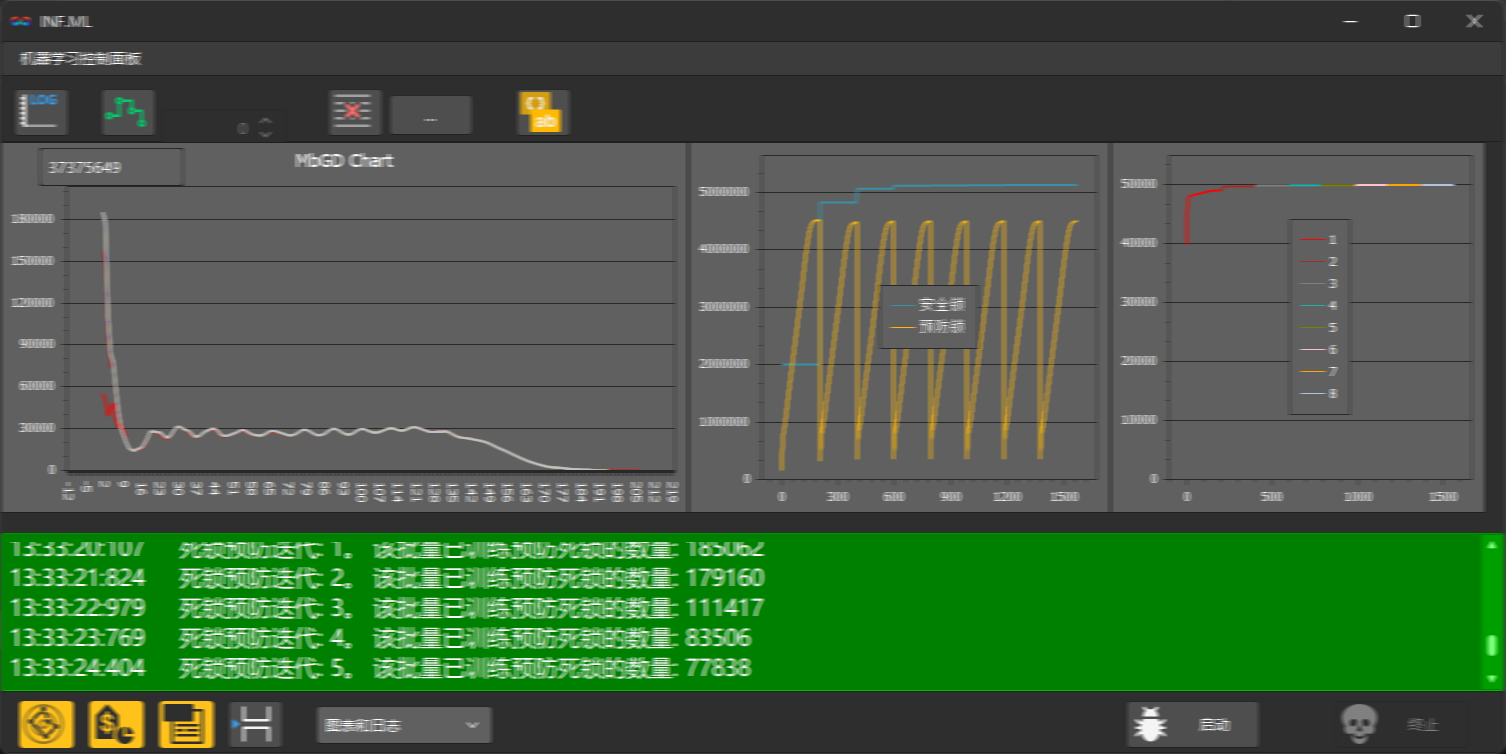
INF.ML根据输入的死锁模型样本定位空间中的死锁,并自动且智能化的处理和预防它们(多神经网络算法模型训练),直到系统中的死锁被预防处理掉(梯度下降)。这与基于时间窗预测的交通管制处理方式的优点在于:
-
INF系统无需再预测未来,即不会存在预测失败而导致博弈现象发生,是一个里程碑式的技术跨越
-
将交通管制的处理维度从时间提升到空间,允许移动机器人运动学算法按照仅考虑几何因素的路径跟随来做,并且依旧可以保证交通管制距离的极限100毫米甚至更低(取决于AGV包络的准确性和车体控制精度)
- 最重要的,AGVsTD现在可以把INF运输优化系统的优化频率提升到毫秒级
令人惊喜的是,INF.ML平台是独立于INF运行时系统之外的,只需要将INF.ML训练的模型导入运行时即可而无需随之一并部署,这意味着部署运行INF系统的服务器和部署其他系统的服务器在性能要求上没有任何区别,甚至相比于高频时间窗预测的调度系统所需的要求更低。因为,虽然一个AI模型在训练阶段需要消耗大量运算资源,但是在训练完毕之后,这个模型的运行已经是普通的服务器集群就可以承受的了。
INF.ML不是基于时间窗预测的交通管制升级版,而是全新的脱离了时间和预测两个概念的基于多神经网络的空间法则的ML交通管制算法,除了交通管制,AGVsTD还在该基础上使用了大数据技术、道路网规划技术等人工智能技术,现在它(INF.ML)已经成为一个全自动化的专业的交通管制算法平台。
INF.ML平台使用深度学习多神经网络来解决交通管制以避免集群之间出现碰撞,并且将交通管制算法和数据 空间化、数据化、具象化、可视化,以直观的表现展示在人们面前,并对系统布局提出合理化建议。
以上提及,INF.ML全自动化处理
INF.ML不是随项目提供的平台,基于AGVsTD云技术,只对AGVsTD的银牌及以上合作伙伴提供访问通道,前往合作伙伴页面>>>
以上足以说明机器学习技术在INF系统的构建和运行中起着非常关键的作用,但是由于整个学习的过程涉及的数据类别几乎都是百万级起步上至亿数量级的,而想要理解和更好的运用分析这些庞大的数据也将离不开大数据处理技术。
